1. 포켓몬 분류
* Validation: https://www.kaggle.com/hlrhegemony/pokemon-image-dataset
import os
os.environ['KAGGLE_USERNAME'] = '캐글 닉네임'
os.environ['KAGGLE_KEY'] = '캐글 키'
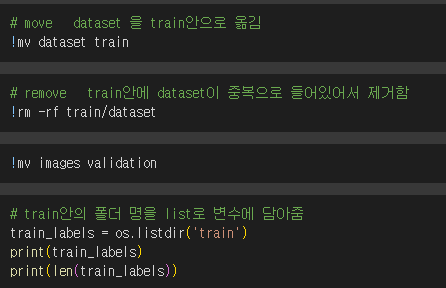
# train data
!kaggle datasets download -d thedagger/pokemon-generation-one
!unzip -q /content/pokemon-generation-one.zip
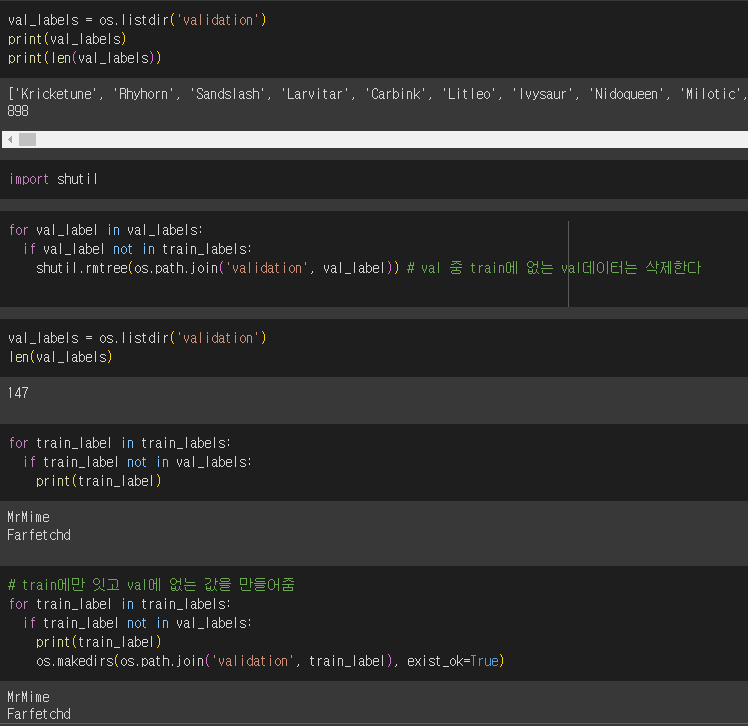
# validation data
!kaggle datasets download -d hlrhegemony/pokemon-image-dataset
!unzip -q /content/pokemon-image-dataset.zip
import torch
import torch.nn as nn
import torch.optim as optim
import matplotlib.pyplot as plt
from torchvision import datasets, models, transforms
from torch.utils.data import DataLoader
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print(device)
data_transforms = {
'train' : transforms.Compose([
transforms.Resize((224, 224)),
transforms.RandomAffine(0, shear = 10, scale = (0.8, 1.2)),
transforms.RandomHorizontalFlip(),
transforms.ToTensor()
]),
'validation' : transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor()
])
}
image_datasets = {
'train' : datasets.ImageFolder('train', data_transforms['train']),
'validation' : datasets.ImageFolder('validation', data_transforms['validation'])
}
dataloaders = {
'train' : DataLoader(
image_datasets['train'],
batch_size = 32,
shuffle = True
),
'validation' : DataLoader(
image_datasets['validation'],
batch_size = 32,
shuffle = False
)
}
imgs, labels = next(iter(dataloaders['train']))
fig, axes = plt.subplots(4, 8, figsize = (16, 8))
for ax, img, label in zip(axes.flatten(), imgs, labels):
ax.imshow(img.permute(1, 2, 0))
ax.set_title(label.item())
ax.axis('off')
2. EfficientNet
* 구글의 연구팀이 개발한 이미지 분류, 객체 검출 등 컴퓨터 비전 작업에서 높은 성능을 보여주는 신경망 모델
* 신경망의 깊이, 너비, 해상도를 동시에 확장하는 방법을 통해 효율성과 성능을 극대화한 것이 특징
* EfficientnetB4는 EfficientNet 시리즈의 중간 크기 모델
from torchvision.models import efficientnet_b4, EfficientNet_B4_Weights
from torchvision.models._api import WeightsEnum
from torch.hub import load_state_dict_from_url
def get_state_dict(self, *args, **kwargs):
kwargs.pop("check_hash")
return load_state_dict_from_url(self.url, *args, **kwargs)
WeightsEnum.get_state_dict = get_state_dict
model = efficientnet_b4(weights=EfficientNet_B4_Weights.IMAGENET1K_V1).to(device)
model
# 모델의 parameter들을 수정되지 않게
for param in model.parameters():
param.requires_grad = False
# 모델 아래의 Sequential 부분을 아래 내용으로 수정
model.classifier = nn.Sequential(
nn.Linear(1792, 512),
nn.ReLU(),
nn.Linear(512, 149)
).to(device)
print(model)
# 학습 gpu 이슈로 주석처리하고 파일 다운
# optimizer = optim.Adam(model.classifier.parameters(), lr = 0.001)
# epochs = 10
# for epoch in range(epochs) :
# for phase in ['train', 'validation'] :
# if phase == 'train' :
# model.train()
# else:
# model.eval()
# sum_losses = 0
# sum_accs = 0
# for x_batch, y_batch in dataloaders[phase] :
# x_batch = x_batch.to(device)
# y_batch = y_batch.to(device)
# y_pred = model(x_batch)
# loss = nn.CrossEntropyLoss()(y_pred, y_batch)
# if phase == 'train':
# optimizer.zero_grad()
# loss.backward()
# optimizer.step()
# sum_losses = sum_losses + loss
# y_prob = nn.Softmax(1)(y_pred)
# y_pred_index = torch.argmax(y_prob, axis =1)
# acc = (y_batch == y_pred_index).float().sum() / len(y_batch) * 100
# sum_accs = sum_accs + acc
# avg_loss = sum_losses / len(dataloaders[phase])
# avg_acc = sum_accs / len(dataloaders[phase])
# print(f'{phase :10s}: Epoch {epoch+1:4d}/{epochs} Loss: {avg_loss:.4f} Accuracy: {avg_acc:.2f}%')
# 학습된 모델 파일 저장
torch.save(model.state_dict(), 'model.pth')
# pth pytorch의 약어 / model.h5로 저장하는 경우는 tensor flow에서도 파일을 열기 위해서
# 가중치없고 학습이 안된 모델을 가져온 상태 (parameter 개수만 수정함)
model = models.efficientnet_b4().to(device)
model.classifier = nn.Sequential(
nn.Linear(1792, 512),
nn.ReLU(),
nn.Linear(512, 149)
).to(device)
print(model)
# model.pth에서 학습했던 내용(데이터)을 모델에 넣어줌
model.load_state_dict(torch.load('model.pth', map_location=device ))
model.eval()
from PIL import Image
img1 = Image.open('validation/Snorlax/4.jpg')
img2 = Image.open('validation/Diglett/0.jpg')
fig, axes = plt.subplots(1, 2, figsize=(12, 6))
axes[0].imshow(img1)
axes[0].axis('off')
axes[1].imshow(img2)
axes[1].axis('off')
plt.show()
img1_input = data_transforms['validation'](img1)
img2_input = data_transforms['validation'](img2)
print(img1_input.shape)
print(img2_input.shape)
test_batch = torch.stack([img1_input, img2_input])
test_batch = test_batch.to(device)
test_batch.shape
y_pred = model(test_batch)
y_pred
y_prob = nn.Softmax(1)(y_pred)
y_prob
# topk 위에서 몇개를 뽑을지 / max는 최댓값만 뽑게
probs, idx = torch.topk(y_prob, k=3)
print(probs)
print(idx)
fig, axes = plt.subplots(1, 2, figsize=(15, 6))
axes[0].set_title('{:.2f}% {}, {:.2f}% {}, {:.2f}% {}'.format(
probs[0, 0] * 100,
image_datasets['validation'].classes[idx[0, 0]],
probs[0, 1] * 100,
image_datasets['validation'].classes[idx[0, 1]],
probs[0, 2] * 100,
image_datasets['validation'].classes[idx[0, 2]],
))
axes[0].imshow(img1)
axes[0].axis('off')
axes[1].set_title('{:.2f}% {}, {:.2f}% {}, {:.2f}% {}'.format(
probs[1, 0] * 100,
image_datasets['validation'].classes[idx[1, 0]],
probs[1, 1] * 100,
image_datasets['validation'].classes[idx[1, 1]],
probs[1, 2] * 100,
image_datasets['validation'].classes[idx[1, 2]],
))
axes[1].imshow(img2)
axes[1].axis('off')
'딥러닝과 머신러닝' 카테고리의 다른 글
| Transfer Learning, Image Agumentation (2024-06-24) (1) | 2024.06.24 |
|---|---|
| 간단한 CNN model 만들기 (2024-06-20) (0) | 2024.06.20 |
| CNN(Convolutional Neural Networks) (2024-06-20) (0) | 2024.06.20 |
| Activation Functions, Backpropagaion(2024-06-20) (0) | 2024.06.20 |
| neuron, Perceptron (2024-06-20) (0) | 2024.06.20 |



